Starke Partner für digitale Mobilität
VIRTUAL VEHICLE holt Infineon und voestalpine mit an Bord

(v.l.n.r.) Jost Bernasch (GF VIRTUAL VEHICLE), Stefan Rohringer (Deputy CTO & Vice President Infineon Technologies Austria), Günter Neureiter (Vorstand; voestalpine Metal Engineering GmbH & Co KG), Gerd Holzschlag (Prokurist und Verantwortlicher Wirtschaftsentwicklung & Bewusstseinsbildung SFG), Andreas Wildberger (Bereichsleitung Strukturprogramme FFG), Harald Kainz (Aufsichtsratvorsitzender VIRTUAL VEHICLE, Rektor der Technischen Universität Graz) ©VIRTUAL VEHICLE
Mit Infineon und der voestalpine beteiligen sich zwei weitere heimische Global Player am steirischen Think-Tank VIRTUAL VEHICLE. Im Verbund mit den langjährigen Eigentümern TU Graz, AVL, MAGNA, Siemens und Joanneum Research wollen die beiden neuen, hochinnovativen Gesellschafter die Entwicklung digitaler Mobilität vorantreiben. Aufgaben gibt es genug, die internationale Nachfrage nach Expertenunterstützung ist groß.
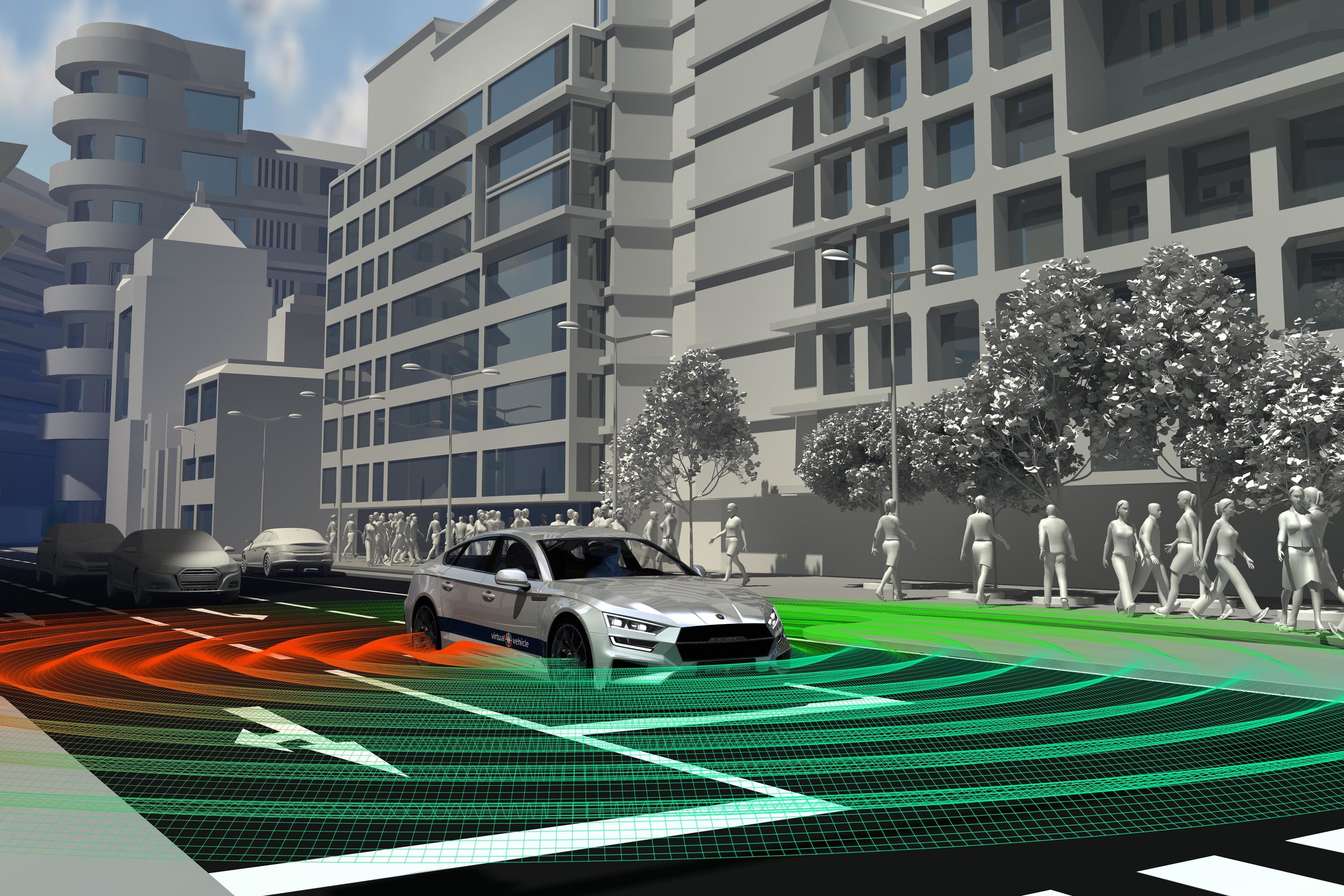
Graz (A), 15.10.2019 - „Wir legen unseren 120 Mio. EUR schweren Forschungsfokus in den nächsten 5 Jahren auf die digitale Transformation von Fahrzeugen. Von selbstfahrenden Fahrzeugen über Sicherheit und Daten-Nutzung bis hin zu innovativen Prototypen-Tests und wegweisenden Mobilitäts-Konzepten reicht die Palette an zukunftsweisenden Forschungsfeldern“, erläutert Jost Bernasch, Geschäftsführer des VIRTUAL VEHICLE Forschungszentrums in Graz. Am Grazer Forschungszentrum versteht man unter digitaler Mobilität alle Lösungen für die Entwicklung und Verbesserung intelligenter und vernetzter Fahrzeuge und deren Systeme.
Bernasch: "Es gibt eine parallele Digital-Welt zu unserer realen Mobilität und deren Forschung und Entwicklung dahinter. Dieser "Digital Twin“ sollte möglichst exakt die reale "Live"-Situation abbilden und zukünftiges Verhalten vorhersagen können.“ Damit Simulationen einerseits in der Entwicklung stimmen und andererseits richtige Aussagen über zukünftiges Verhalten wie Wartungsbedarf ermöglichen, braucht es sehr viel Know-how in verschiedenen Forschungs- und Industriebereichen. Dies führt dazu, dass Digital- und Fahrzeugindustrie immer stärker zusammenwachsen. „Wir arbeiten mit unseren exzellenten Partnern intensiv an der intelligenten Verknüpfung dieser zwei Welten, damit wir sicherer, umweltschonender, effizienter, kostengünstiger und auch einfacher an unser Ziel kommen", so Bernasch. Dieser Mega-Trend verändert auch den Rail-Bereich stark, die Vernetzung verschiedenster Mobilitäts-Formen, virtuelle Entwicklung und vorausschauende Instandhaltung sind Kernthemen der Forschung.
Bernasch: „Mit Infineon und voestalpine als neue, in Österreich verankerte Anteilseigner, verstärken wir unser internationales Netzwerk für Spitzenforschung und vertiefen die gemeinsame Expertise. Infineon spielt eine führende Rolle in den Bereichen Sensorik und innovative Rechenplattformen für automatisiert und autonom fahrende Fahrzeuge. voestalpine Railway Systems ist Marktführer im Bereich Systemlösungen für Bahninfrastruktur, mit einem einzigartigen Know-how in den Bereichen Material- und Prozessforschung. Gemeinsam arbeiten wir an Hightech-Lösungen für eine global zusammenwachsende Fahrzeug- und Digitalindustrie vom heimischen Standort aus!“
TU-Graz Rektor Harald Kainz: „Das VIRTUAL VEHICLE demonstriert seit Jahren, wie man- in Kooperation mit der TU Graz, nationalen sowie internationalen Forschungseinrichtungen und Industriepartnern - mittels industrieorientierter Spitzenforschung neue Technologien für innovative, Produkte hervorbringt. Das Partnernetzwerk des Forschungszentrums bietet allen wissenschaftlichen und industriellen Partnern einen attraktiven Zugang zu disziplinübergreifenden Forschungsprojekten und -themen. Voller Stolz begrüße ich als Gesellschaftervertreter Infineon und voestalpine mit an Bord des größten österreichischen Forschungsflaggschiffes für digitale Mobilität!“
Landesrätin Barbara Eibinger-Miedl: „Das VIRTUAL VEHICLE ist ein internationales Erfolgsbeispiel für die Zusammenarbeit zwischen Wissenschaft und Wirtschaft und trägt seit vielen Jahren wesent- lich dazu bei, dass die Steiermark eine der innovativsten Regionen in Europa ist. Ich freue mich, dass sich künftig mit Infineon und der voestalpine zwei herausragende Unternehmen als Gesell- schafter einbringen werden. Das stärkt die Arbeit am VIRTUAL VEHICLE und damit den Forschungs- standort Steiermark weiter!“
Andreas Wilderer, Bereichsleitung Strukturprogramme Österreichische Forschungsförderungsgesellschaft mbH (FFG): "Das VIRTUAL VEHICLE mit seinen neuen Partnern Infineon und voestalpine ist ein besonders erfolgreiches Beispiel für ein COMET-Forschungszentrum. Es erfüllt alle Zieldimensionen des COMET-Programms und stärkt damit den Forschungs- und Wirtschaftsstandort Österreich. Dass die nationalen und internationalen Kooperationen besonders gut gelingen, zeigt die hohe Hebelwirkung der eingesetzten COMET-Fördermittel von 1:5: Das VIRTUAL VEHICLE schafft es, zu jedem einzelnen FFG-Fördereuro vier weitere Forschungs- und Entwicklungseuros aus ganz Eu- ropa nach Österreich zu holen."
„Forschung wirkt. Das Forschungszentrum VIRTUAL VEHICLE wächst! Wir freuen uns mit dem gesamten Team und den neuen Partnern des VIRTUAL VEHICLE und gratulieren zu dieser Erweiterung“, betonen Henrietta Egerth und Klaus Pseiner, die Geschäftsführer der Österreichischen Forschungsförderungsgesellschaft FFG.
Vom Sensor bis zur Weiche
Mit den Technologiekonzernen Infineon und voestalpine gab es bereits eine lange, intensive und erfolgreiche Zusammenarbeit in zahlreichen Projekten. „Die Beteiligung am VIRTUAL VEHICLE ist ein wichtiger strategischer Schritt.“, erklärt Stefan Rohringer, Stellvertreter Vorstand Technik Infineon Technologies Austria und Leiter des Infineon Entwicklungszentrums Graz: „Infineon arbeitet intensiv an Mikroelektronik-Lösungen für die Mobilität der Zukunft, wie das automatisierte und autonome Fahren. Für Infineon sind Informationen auf der Ebene der Gesamtfahrzeug-Entwicklung daher ein enormer Mehrwert, den wir gemeinsam mit dem VIRTUAL VEHICLE generieren wollen“. Entwicklerinnen und Entwickler des gesamten Infineon-Konzerns werden aufgrund der hohen globalen Relevanz von effizienten Halbleiterlösungen für den Automotive-Markt an den Projekten arbeiten, die Verkehrs- und Beförderungssysteme intelligenter, flexibler und autonomer machen. In Graz befindet sich mit aktuell über 430 Mitarbeiterinnen und Mitarbeiter eines der größten Entwicklungszentren von Infineon.
Gemeinsam mit der voestalpine, die mit ihrem Bereich Railway Systems globaler Marktführer ist, kann das VIRTUAL VEHICLE zudem noch stärker dazu beitragen, Österreichs Position als weltweit fünftgrößter Exporteur von Schienenfahrzeugen und Ausrüstung zu festigen. „voestalpine Railway Systems gilt schon heute als weltweiter Marktführer bei kompletten Bahninfrastruktursystemen einschließlich Premiumschienen, Weichensystemen und Signaltechnik. Mit unserer Beteiligung am Forschungszentrum VIRTUAL VEHICLE nutzen wir einmal mehr die Möglichkeiten der Digitalisierung für die Weiterentwicklung des Bahnfahrweges. Die Kombination aus bestehendem Bahn-Know-how mit modernen Methoden der Simulation sehen wir von voestalpine Railway Systems als Basis dafür, unsere Position in diesem anspruchsvollen Markt weiter zu stärken. Die Kooperation mit VIRTUAL VEHICLE ermöglicht uns, Zukunftstechnologien gemeinsam zu entwickeln, um unseren Kunden optimierte Lebenszykluskosten und höchste Verfügbarkeit des Bahnfahrweges zu garantieren.“, erklärt Günter Neureiter, Mitglied des Vorstandes der Metal Engineering Division des voestalpine Konzerns.
Äußerst erfolgreich und lukrativ: Internationale Vernetzung & Gehirnschmalz-Hebel
Mit seinen über 150 internationalen Forschungspartnern aus Industrie und Wissenschaft sowie seinen nunmehr sieben exzellenten Eigentümern ist das VIRTUAL VEHICLE bestens für die herausfordernden Aufgaben der digitalen Mobilität aufgestellt. Kurze Entwicklungszeiten, hohe Qualitätsanforderungen und große Technologievielfalt werden so bewältigt.
COMET-Zentren wie das VIRTUAL VEHICLE sind aber auch eine wirtschaftliche Erfolgs- story. Dies bestätigt eine kräftige Hebelwirkung von 1:5 bei öffentlichen Investitionen in die Forschung. VIRTUAL VEHICLE gelingt es, aus einem Euro FFG-Fördergeld vier Euro an F&E Geld aus ganz Europa zu lukrieren. Ähnliche Erfolge gibt es im Bereich der EU-Projekte. Das jüngste EU-Ranking, welches erfolgreiche Forschungsaktivitäten im europäischen Forschungsprogramm Horizon 2020 erfasst, zeigt: Unter allen österreichischen außeruniver- sitäreren Forschungseinrichtungen landete das VIRTUAL VEHICLE auf Platz 1 mit knapp 70.000 EUR pro Mitarbeiter eingeworbene europäische F&E-Förderung aus Horizon 2020. Das VIRTUAL VEHICLE liegt so in absoluten Zahlen ebenfalls als Platz 1 in der Steiermark und Platz 3 in Österreich. Das ist ein schöner Erfolg für das noch junge Forschungszentrum.
Gezielter Technologietransfer - den Markt im Visier
Spitzenforschung für industrieorientierte Aufgabenstellungen – das ist der Fokus von VIRTUAL VEHICLE. Ziel ist ein rascher und effizienter Technologietransfer von Forschungs- ergebnissen in marktfähige Produkte.
Einer der großen Erfolgsgeschichten ist die Co-Simulationsplattform ICOS (Independent Co- Simulation). Ursprünglich eine wissenschaftliche Arbeit, generiert die Software heute be- trächtliche Lizenzeinnahmen aus der Automobil-Entwicklung. ICOS erlaubt Co-Simulation bei komplexen Systemen durch die Integration verschiedenster Simulationswerkzeuge. So können Modellierung, Simulation, Optimierung und Validierung von Innovationen im Fahrzeug deutlich verbessert und beschleunigt werden. Heute ist etwa die Kopplung von Simulationen und realen Fahrzeugdaten besonders im Bereich des autonomen Fahrens wichtig, um die Fahrzeuge in allen erdenklichen Situationen effizient testen zu können.
Weitere Beispiele für die rasche Umsetzung von Forschungsergebnissen sind Projekte zur emissionsarmen Mobilität - das Thema ist heute aktueller denn je. Derzeit entwickeln Exper- ten des VIRTUAL VEHICLE „TED“, den „Tomographic Emission Detector“, ein System zur schnellen und exakten Messung von Motorabgasen. Mittels optischer Sensoren ist TED um ein Vielfaches schneller als aktuell verfügbare Verfahren. Aktuell wird ein Spin-Off zur Fertigentwicklung und Industrialisierung vorbereitet.
Beispiele der Forschung - Roborace, Holzauto und getestet wird im international einzigartigen ALP.Lab
Ein weltweit wachsendes Partnernetzwerk des VIRTUAL VEHICLE ermöglicht den attraktiven Zugang zu disziplinübergreifenden Forschungsthemen. Ein Beispiel dazu ist die Zusam menarbeit mit der TU Graz. Mit dem Institut für Regelungs- und Automatisierungstechnik werden etwa im Projekt Roborace Fahrfunktionen für internationale Rennen mit autonomen, fahrerlosen Rennfahrzeugen entwickelt. Damit können die technischen Grenzen von Senso- ren, Multicore Rechenplattformen und Berechnungsalgorithmen erforscht werden, deren zukunftsweisende Ergebnisse in die reale Fahrzeugentwicklung einfließen.

WoodCAR ©VIRTUAL VEHICLE
Für Aufsehen sorgte das Projekt WoodCAR, in dem VIRTUAL VEHICLE als Konsortialpart- ner in enger Kooperation mit dem Institut für Fahrzeugsicherheit und weiteren steirischen Forschern mittels raffinierter Schichtpressung Holzbauteile entwickeln, die tragende Metall- bauteile in Fahrzeugen nachhaltig ersetzen können. Holz könnte in zehn bis fünfzehn Jahren für bis zu 10 % des Gewichtes eines Autos verantwortlich zeichnen. Mit dieser Innovation konnte das Interesse von Konzernen wie VW oder MAN gewonnen werden.
International einzigartig ist auch der Aufbau von Europas Testumgebung für automatisierte Fahrzeuge namens ALP.Lab, an dem das VIRTUAL VEHICLE maßgeblich beteiligt ist.
Der neue Fahrsimulator Drive.LAB ist ein Fahrlehrer für automatisierte Fahrzeuge. Ziel ist, dass automatisierte Fahrzeuge fahren und reagieren, wie man es als Mensch/Verkehrsteilnehmer erwartet. VIRTUAL VEHICLE kann damit das Verhalten des Fahrzeugs weiter verbessern und verständlich darstellen.
Ausblick
„Das VIRTUAL VEHICLE ist in den letzten 15 Jahren von 20 auf beinahe 300 Spitzenforscher angewachsen. Vom Nobody zum heute international gefragten strategischen F&E-Partner“, beschreibt Bernasch die einzigartige Erfolgsgeschichte. „Das Fundament COMET K2 und unsere europaweit nachgefragten Forschungsthemen verschaffen uns eine hervorragende Ausgangslage für die Zukunft. Unser Track Record von 4 Mio. EUR eingeworbenen EU-Fördermittel pro Jahr, Auszeichnungen wie die kürzlich erhaltenen Preise „ITEA Award of Excellence 2019“ und europäischer Forschungspreis von EUREKA für „Best Project 2019“, daran macht sich unser profundes Gewicht auf der europäischen Forschungsbühne fest, das wir jetzt nutzen können. Das alles und mit dem zusätzlichen Schub durch die beiden neuen Gesellschafter Infineon und voestalpine wird uns auch der nächste Meilenstein gelingen: Virtual Vehicle als das Forschungsflaggschiff für digitale Mobilität in Österreich!“
VIRTUAL VEHICLE – Enabling Future Vehicle Technologies
Die VIRTUAL VEHICLE Research GmbH ist ein führendes internationales F&E-Zentrum für die Automobil- und Bahnindustrie mit Sitz in Graz, Österreich. Die nahezu 300 Forscherinnen und Forscher konzentrieren sich auf die konsequente Virtualisierung der Fahrzeugentwicklung. Diese Verknüpfung von numerischen Simulationen und Hardware-Tests führt zu einem umfassenden HW-SW Gesamtsystem-Design und zur Automatisierung von Test- und Validierungsverfahren.
Das internationale Partnernetzwerk von VIRTUAL VEHICLE besteht aus rund 150 internationalen Industriepartnern (OEMs, Tier-1 und Tier-2 Zulieferern sowie Software-Anbietern) sowie über 40 internationalen wissenschaftlichen Institutionen.
VIRTUAL VEHICLE ist das größte COMET finanzierte Forschungszentrum Österreichs und ist aktuell in rund 40 EU-Projekten aktiv. Zusätzlich bietet VIRTUAL VEHICLE ein breites Portfolio an Auftragsforschung für die Fahrzeugentwicklung.
Weitere Informationen unter www.v2c2.at
Weiterführende Presseartikel: Kleine Zeitung, APA, Industriemagazin, Voestalpine Blog
Kontakt für Rückfragen:
Katrin Ruckenstuhl, MA
katrin.ruckenstuhl@manggei.com
+43 664 5052422